パイプライン検査ゲームを上げる
-109094 "XOCEANのXO-450(写真:XOCEAN)")
パイプライン検査事業で大混乱が起こっています。より進化した遠隔操作車両(ROV)、デジタル志望、無人水上艦船(USV)は、データ収集と成果物の新しい時代を推進しています。
オフショアキャンペーンの時間を短縮しながら、オペレーターがパイプラインで獲得できる新しい洞察の量に革命をもたらします。
スペースで動作しているもののいくつかは、エクイノール、シェルおよびBPです。大きな要因は、安全性への影響を最小限に抑えるだけでなく、コストを削減しています。これは、この分野における最新の進化です。トム・グランシーは、アバディーンで開催された10月の水路学会で概説された、エクイナーのパイプラインマッピングおよび地理情報のアドバイザーです。
彼は、リモートビークルの運用は、彼自身のキャリアの中で、無人の有人潜水艇(人間を危険にさらす)からROV、無人の水中車両(UUV、通常は自律型水中車両/ AUVと呼ばれますが、完全に自律的ではない)グランシー)。 ROVへの移行により、人間はリスクから解放されましたが、人間をサポート船につなぐためのテザーによって範囲が制限されました。 AUVにより、調査をより迅速に行えるようになりましたが、AUVは、問題が発見された場合にいつでも詳細なスポット評価を停止および実行できませんでした。
より最近の進化は、高速ROVに向かっています。 Equinorは、Superior ROVを使用するDeepOceanとSurveyor Interceptor ROVを使用するSubseaの2つの主要プロバイダーと契約を結んでいるとGlancy氏は述べています。どちらもテザリングされていますが、オンボードのHDイメージングとレーザーパッケージのおかげで、2ktと比較して4ノット(kt)でROVよりも速く調査できます。しかし、それはまた、彼らがサポート船が付属していることを意味します-そして、付属のオーバーヘッドを超えています。
これらの高速ROVは、従来のパイプライン検査ワークフローを完全に変える人気のあるツールになりました。 「過去20年から30年の間、パイプライン検査は比較的単純なワークフローでした。シェルの上級プロジェクト調査員であるCalum Shand氏は、今年初めにアバディーンのオフショアヨーロッパに語った。まず、物理探査船が、オープンウォーターパイプラインセクション上でサイドスキャンソナーを使用して、遠隔操作牽引車(ROTV)を牽引します。その後、異常レポートが作成され、作業クラスのROV(DP2クラスの船で)がスポットダイブを実施し、さらに修正を計画するために使用されるビデオ映像を取得する2回目の調査が必要になります。しかし、「2容器キャンペーンの使用に関しては時間がかかり、比較的非効率的です」とシャンドは言います。
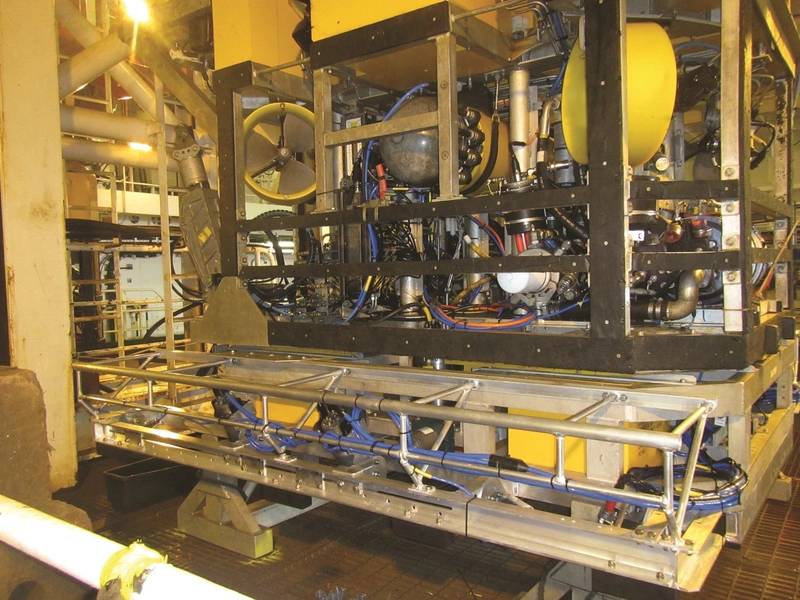
 優れたSROV(写真:DeepOcean)
優れたSROV(写真:DeepOcean)
効率を上げる
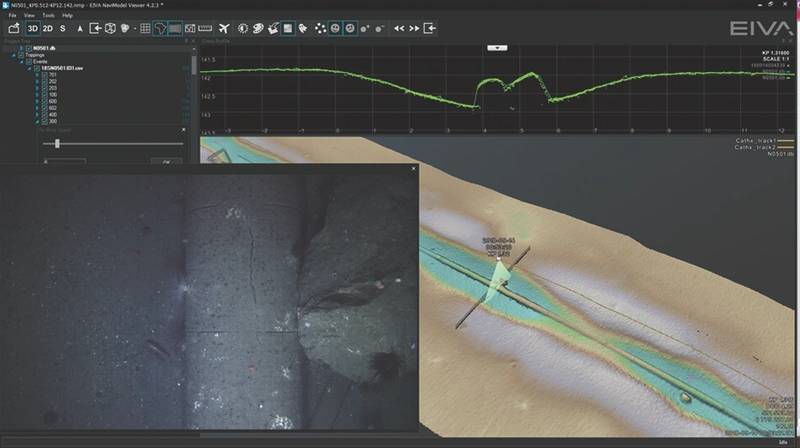
シェルの場合、200本以上のパイプラインとアンビリカルがあり、全長3,000キロメートル(km)であり、英国北海だけで、より簡単で迅速な調査は明白なボーナスです。 2018年に、シェルはDeepOceanの「高速デジタルイメージングサービス」を使用して新しい調査を実施しました。これには、2018年9月から45日間のノンストップキャンペーンでEdda Flora船で運用された自動追跡機能を備えたKyst Design Superior ROVが含まれていました。Superiorは、Teledyneデュアルヘッドマルチビームエコーサウンダー、Edgetechサイドスキャンソナーそして、サブボトムプロファイラー、パイプトラッカー、CathX超高精細(UHD)カメラ(x3)、高スペック慣性航法。 Shand氏によると、最大4.5メートルの海で船舶を発射できるということは、作業をシーズンの早い時期に開始し、秋に遅く実行できることを意味し、音響モードで5kt、パイプライン検査で3.5-4ktの速度でした。
さらに、サイドスキャンソナーを使用することで、船舶はパイプライン調査から抜け出し、シアウォーターフィールドでのジャッキアップ掘削現場の調査など、「アドホックなフライバイジョブ」を実行できます、とシャンドは言います。しかし、最大の利点は、CathXシステムによって作成されたUHD静止画であり、これにより「信じられないほどの詳細」が可能になりました。 「ズームインすると、サブセンチメートルの詳細が表示され、釣りの干渉からパイプの上部にスコアリングするなど、何が起こっているのかを推測できます」と彼は言います。
高解像度のマルチビーム測深データと組み合わせることで、これらのUHD写真は、3Dメッシュモデルとカラーポイントクラウドを通じて、インシデントと異常のまったく新しい方法を提供し、年次調査データセットの自動比較が可能になりました、と彼は言います。 「これらのデータセットは、大きな混乱を引き起こしています」と、シャンドは言います。 「それは根本的な変化です。」
 (画像:シェル)
(画像:シェル)
データ駆動の決定
この機能により、修復も高速になります。たとえば、新しいパイプラインの空きスパンを発見したシェルは、マルチビームデータをエクスポートして、必要な岩の量を正確に計算できるVan Oord請負業者に渡すことができました。さらに、パイプラインエンジニアは、従来の「現状のまま」の情報と最近の「現状のまま」のマルチビームデータを比較する能力が向上しました。
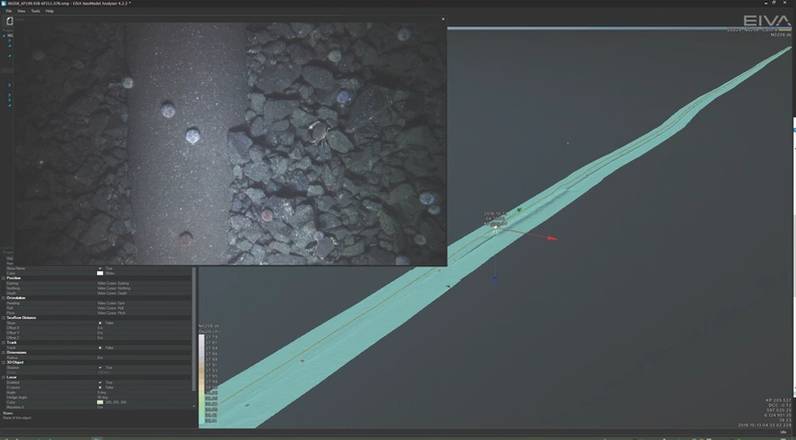
今年[2019]、シェルは再び戻ってきました。今回はReach Subseaで、MMTとKystで設計され、ブームアームを装備したSurveyor Interceptor車両を使用しました。これらは、パイプの円周方向のカバレッジを改善します。 「2隻の船舶による1つのキャンペーンから、1隻の船舶/請負業者による1つのキャンペーンに移行しました」とShand氏は言います。 「従来の方法と比較して約80万ポンド(100万ドル)節約し、結果として二酸化炭素(CO2)の排出量を削減しました」と、主に船舶の時間を50%短縮しました。
特に関連するデータ処理を自動化することを中心に学習曲線があり、生成された膨大な量のデータを処理する際にシャンドが追加されます。また、振る舞いとワークフローに関連して、この作業を異なる方法で行うための障壁もいくつかあります。しかし、シャンドは、外部のGISリンクされた3Dモデル化された調査データをCADモデルおよび内部パイプライン検査データと統合し、パイプシステム全体の強力なビューを可能にするなど、可能性が大きいと言います。岩石、破片、精練などの検出が自動化されているマシンビジョンとディープラーニングを追加すると、より自動化された操作が可能になり、リアクティブ操作ではなく予測分析の能力が向上します。
 (画像:シェル)
(画像:シェル)
高速デジタル画像検査
自動イベンティングを可能にするビデオからデジタルに移行し、検査速度を向上させる高速デジタル画像検査(FDII)も、BPの原動力となっています。 BPのシニアテクノロジースペシャリストであるEric Primeauは、アバディーンで開催されたSubsea UKのUnderwater Roboticsカンファレンスで、ボトムアップアプローチを採用し、センサーパッケージを選択してから、パッケージを先に乗せるのではなく、そのパッケージを続行することについて話しました。
同社は、2017年にDeepOceanで初めてFDIIキャンペーンを実施し、478 kmのパイプライン検査を行い、UHDデジタルイメージング、レーザー、デュアルヘッドマルチビーム、サイドスキャンソナーを平均5.1 km /時で実行しました。従来の方法で予測された578時間と比較して、プロジェクトは94.7時間で完了しました。最終データには、3Dメッシュと色分けされたレーザーポイントクラウドが含まれていました。
BPは、2018年にMMTとi-Tech7でさらに2つのキャンペーンを実施し、次に2019年にi-Tech7で再度キャンペーンを実施しました。これらのプロジェクトを通して、BPは非接触電界勾配陰極防食センサーのテストも行っています。ただし、Shandと同様に、このアプローチで収集されたデータを処理することは困難です。
 (画像:BP)
(画像:BP)
有人水上船なしで行く
それでも、この方法では有人のサポート船を使用する必要があります。そのため、オペレーターはパイプライン検査にUSVの使用を後回しにしています。今年(2019年)、BPはXOCEAN XO-450 USVを使用したパイプライン検査を試みました。これは北海では初めてです。スコットランド北東部のピーターヘッドからUSVを展開し、BPは30インチの放棄されたミラー輸出パイプラインの浅い水域を調査しました。パイプラインの4.75km区間で水深2.5mから40mまでの2回目の実行で、USVはR2Sonicsデュアルヘッドマルチビームシステム、Valeport SWiFT音速プロファイラー、および車両の向き、姿勢、上下動と速度。
Millerプロジェクトでの成功により、BPはアゼルバイジャンのカスピ海で数百キロメートルの浅い水パイプライン(水深12-25m)の検査のために同じシステムを配備するように依頼しました。 「オフショア産業は、USVの使用が増加し、機能が発達するにつれて、大きな変化の先端にいます。定期検査のために有人船を使用することは困難です」と、Primeau氏は言います。 「USVは、高解像度の海底調査を実行するための標準ツールになりつつあり、ROVとAUVの統合など、補完的な水中システムを開発するためのゲートウェイでもあります。」
シェルはまた、USVを検討しており、2019年の短い試行調査でアバディーン北部の海岸に沿ってXOCEAN XO-450をテストしています。ここで、データと帯域幅が課題になる一方で、5Gの展開とクラウドが役立ち、リアルタイムの検査と分析への扉を開くと彼は言います。
Equinorは、パイプライン調査にもUSVを使用しています。 XOCEANは2019年9月に、イギリス東海岸およびドイツ北海岸沖のEquinorのパイプライン調査を完了しました。 XOCEANによると、MBESを使用して、2〜40メートルの水深で合計120マイルの4つのパイプラインが2〜40メートルの水深で調査されました。別のUSV船のオペレーターである4D Oceanは、今年初めに船体に取り付けられたMBESでEquinorの沿岸調査を実施しました。
XOCEANはまた、2019年9月にUSVから最初の後続ワイヤ陰極防食(TWCP)パイプライン調査であると主張していることを実行しました。これには、シェトランド近くの海岸から9 kmまでのパイプラインでのPXグループのマルチビームソナーによるTWCP調査が含まれますアバディーンシャイア沖。 PXグループは、北海ミッドストリームパートナー向けに、セントファーガスガスターミナルと関連するフリッグUK、アバディーンシャイアの施設と北海を結ぶシェトランド島地域ガス輸出システム(SIRGE)オフショアパイプラインを運営および維持しています。
 (画像:シェル)
(画像:シェル)
USVとAUVの組み合わせ
ただし、USVに搭載されているセンサーは、非常に深くしか到達しません。より深い水パイプライン調査をUSVで行う場合は、代替アプローチが必要です。これは、USVからAUVを展開することを意味します。これは、ノルウェーのEquinorでSwire Seabedが行っていることです。 2018年10月、2つのプロジェクトの最初で、小型水上船を備えたKongsberg Hugin AUVを展開しました。これにより、位置の更新とベルゲンのコントロールとの通信を維持できました。検査は、コルスネス(陸上プラント)とトロールA(ベルゲンからわずか65km)の間の3つのパイプラインで行われました。合計180 kmのパイプラインが、海底パイプラインの完全性を検証するために、深浅の合成開口ソナーとHD画像データを取得した2つのAUVダイブで検査されました。
2019年7月に、Swireは「最初の完全無人オフショアパイプライン検査」を主張し、再びEquinorについて、海岸から最大100 kmを調査しました。これにより、MBES、サイドスキャンソナー、CathXカメラシステムを搭載したHuginが、英国のHushcraft社製のSEA-KIT Maxlimer USVと組み合わせて使用されました。深さ175 kmの4本のパイプラインが調査されましたが、再び深浅測量、合成開口ソナーおよびHD画像データが使用されました。 SEA-KIT Maxlimerを使用すると、Huginはオフショアにとどまり、USVの海にドッキングして充電し、ベルゲンのリモートセンターへの通信および制御リンクとして使用できます。スワイア氏によると、小型の無人船を使用することで、燃料使用量と二酸化炭素排出量が95%削減されます。トムグランシーは別の言い方をします。人々をオフショアにすることは100%削減されます。彼の究極の目標は、水上艦を全く持たないことです。
[編集者注:Swire Pacific Offshore(SPO)は11月に、2020年2月末からSwire Seabedの子会社を閉鎖すると発表しました。これは、油田サービス企業が業界の低迷の影響を感じ続けるためです。現在Swire Seabedが管理している船舶は、シンガポールに拠点を置くSPO艦隊の一部として運営および販売されます。]
 SEA-KITは、リモートパイプライン操作用のHugin AUVを収容しています。 (写真:Swire Seabed)
SEA-KITは、リモートパイプライン操作用のHugin AUVを収容しています。 (写真:Swire Seabed)
次のステップ
いくつかはこれに取り組んでいます。 2018年、Modus Seabed Interventionは、オーストラリア北西部のHAUV(改良型Saab Seaeye Sabertooth AUV)の1つを展開して、CathXスカウトレーザープロファイリングとマルチビームエコーソーダ(MBES)とともに広がるHDイメージングを使用して約240 kmのパイプライン調査を実施しました。リアルタイムのデータ収集のために、これは船舶からのテザーでHAUVを使用して実行されましたが、テザーなしでは可能です。
OceaneeringのFreedomハイブリッド車は、海中常駐車に関しては大幅に宣伝されていますが、実際には最初は自律的なパイプライン調査用に設計されました。 Oceaneeringの主な目標は、異常が検出された場合、停止して追加の検査作業を実行できる効率的な空力車両を持つことでした。実際、SteffanLindsøは、10月にスタヴァンゲル近郊のUnderwater Intervention Droneデモイベントで、2020年の車両の最初のプロジェクトは「おそらく英国で」のパイプライン検査になると語った。
カワサキサブシーは、調査検査用のパイプライントラッキングを組み込んだ第2世代の車両もテストしています。今年(2020年)には、DeepStarと日本財団とのパイプトラッキングのテストが合計で行われます。パイプライン検査スペースに混乱があり、まだまだありません。
マシンビジョンテクノロジーは、パイプライン調査の提供方法の改善にも役立っています。 Subsea 7の一部であるi-Tech 7は、精密検査の高速デジタル検査サービスを提供するものの1つであり、自動化によってますますサポートされています。
 (写真:i-Tech 7)
(写真:i-Tech 7)
FDII
その高速デジタル検査パイプラインサービスは、専用のスキッドを介して提供され、サービスが必要な場所に応じて、艦隊内のあらゆる作業クラスROVに簡単に輸送および移動できます。スキッドには、ポート、センター、スターボードの3つの超高精細カメラと、静止画像間で同期されたレーザープロファイラーとパイロットカメラを備えた、改良されたCathXパスファインダースイートが装備されています。ライトはROVパイロットの視界に影響しません)。
このようなデジタルイメージングスイートを使用すると、オンラインでの手動イベントを可能にし、画像のぼやけを防ぐために1 km /時で従来実行されていたビデオベースの調査と比較して、3〜4.5 km /時で高速に調査を実行できますウェイク、チーフ測量技師、i-Tech7。2018年のBPの一般的な目視検査プロジェクトは、全長310kmの8つのパイプラインをカバーし、さらに2つの構造物検査により、10日間の船舶を節約しました。従来のパイプライン検査速度。 BPの2019 FDIIパイプライン検査キャンペーンで同等の節約が実現され、CO2排出量の削減に貢献するという追加の利点がありました。
パイプラインエンジニアは、パイプラインのオルソモザイクおよび3Dモデルも取得します。これらは、ビデオのように連続的にではなく、空間的に配置できます。しかし、それだけではありません。 I-Tech 7は、米国のIT、科学、テクノロジー企業であるLeidosと協力して、データ処理ルーチンを自動化して、エンジニアに有益な情報をより迅速に提供する方法について取り組んできました。たとえば、画像を自動的に分析して、発生する可能性のあるイベントを含む画像を抽出することにより、人間がレビューする画像の量を劇的に減らします。 i-Tech 7は、今年(2019年)これらの手法を使用した最初の調査を実施しました。
興味深いことに、これはデジタル画像に限定されない手法です。 i-Tech 7のグローバルインスペクションマネージャーであるGeorge Gair氏は、デジタルインスペクション用に開発されたアルゴリズムの約60%がビデオでも機能すると述べています。
「聖杯は自動的な分類とイベンティングです」とウェイクは言います。 「私たちはそれに向かって、アルゴリズムを調整し、自動化を強化し、可能性のあるイベントを検出するマシンビジョンから始めています。」その後の次のステップはライブ検出を行い、エンジニアが検査結果に迅速にアクセスしてそれらに対応できるようにすることです。より迅速に。
 (画像:i-Tech 7)
(画像:i-Tech 7)
コンピューティングパワーを使用して数百万の画像を比較し、特定の属性を検出する機械学習を含むこれらのタイプのテクノロジーの誇大宣伝にもかかわらず、特に標準化された設計とは反対のことを好む業界では、それほど簡単ではありません。トレーニングデータ(パイプラインのイメージ)を取得することも困難です。
しかし、発見されたパイプラインの整合性の問題の約90〜95%は、フリースパンと埋没暴露に関連する傾向があるとGair氏は述べています。異常である傾向がある損傷は、より時間がかかります。また、プロセスの一部で人間が必要になると彼は言います。
車両プラットフォームに関しては、i-Tech 7はROVベースのスキッドに固執しています。 AUVを使用すると、調査をより迅速に実行できるようになりますが、パイプラインの上方を泳ぐ傾向があり、必ずしもパイプの包括的なビューを提供する完全なFDIIセンサーパッケージを搭載する必要はありません。異常が検出された場合により多くのデータを停止および収集できるシステムを持つことに重点が置かれていますが、FDIIデータでは、超高解像度で上からだけではなく、より多くの角度からパイプを見ることができます、エンジニアはすでに必要な情報をすべて持っています。戻って詳細な検査を行う必要はありません。


-168147 "ブラックフォード・ドルフィン半潜水型掘削リグ(提供:ドルフィン・ドリリング)")
-168002 "(クレジット:SLB)")

-167897 "トランスオーシャンのバレンツ半潜水リグ(クレジット:トランスオーシャン)")
-167856 "(クレジット:エニ)")

-167727 "掘削船グローブトロッターI(クレジット:ノーブルコーポレーション)")
-167623 "(クレジット:ドミニオン・エナジー)")

-167415 "ステラ・エナジー1 MOPU(クレジット:ドライドックス・ワールド)")

-167309 "ウェスト・カペラ掘削船(クレジット:Seadrill)")
-167178 "(クレジット:Brava Energia)")
-166941 "(クレジット:ウルシュタイン・ヴェルフト)")