海底クロールロボット:新しい課題への道具

図1シーオッターサーフゾーンクローラー。 Image:C-2 Innovations、Inc.

図3:曳航されたペイロードスレッドを持つ海牛。 Image:C-2 Innovations、Inc.
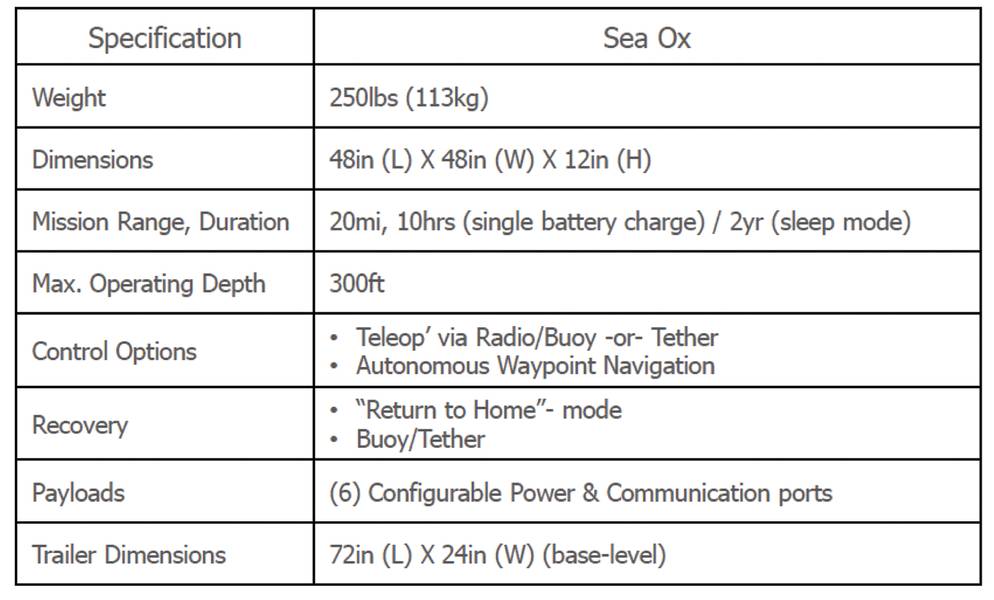

表1:Sea Oxの仕様。 Image:C-2 Innovations、Inc.
海に戻る
人生は海で始まり、徐々に上陸していったと広く言われています。追跡ロボットの場合、この傾向は逆転する。大幅な防衛需要に支えられて2000年代初頭に、コンパクトな地上ロボットが急速に開発されました。 iRobotのPackBotやFoster-MillerのTalonのような製品は、人にやさしい高性能地上ロボットを先駆けて開発しました。過酷な環境での操作の要求は、これらのツールを堅牢にし、完全に耐水性のバリアントに惹きつけました。残念なことに、エネルギー貯蔵の時間制限では、自律性とテレメトリーは海底のクローリングロボットを生産的なツールではなく斬新なものにしました。これは変更されました。
サーフを通して
今日、C-2 Innovations、Inc.(C2I)は、サーフゾーンを通り、海に戻ってくるために、生産準備が整った海底クロールロボットのファミリーを開発しました。このファミリーには、コンパクトなSea Otterとより広大なSea Oxが含まれています。
図1のシーオッターサーフゾーンクローラー(SZC)は、第2世代の完全自律型水陸両用ボトムクローラーであり、高水流地帯から陸上に100mまでの深さで作動することができます。テザーがなければ、システムは以前のシステムではできなかった領域および電流で動作することができる。
C-2iオターは、16kmの水中または20kmの土地を運転することができ、1ヶ月間ステーションを維持することができます。コマンドまたは事前に設定されたタイムアウトのいずれかに戻る。混合環境で動作する能力はユニークであるが、SZCは表面工作、水泳または人間ベースの技術では不可能な領域へのアクセスを可能にする。 Sea Otter SZCは、負の浮力で動作し、低エネルギー境界層で動作します。低プロファイルにより、電流抵抗がさらに最小限に抑えられます。乗り物は1.5 mの急降下のサーフで運転しており、人間の負荷を支えない柔らかい地形を横切ることができます。最近のテストでは、40kgのペイロードを持ち運ぶことができ、45kgのスレッドをさまざまな海洋表面に渡すこともできました。
Otter-SZCの仕様は次のとおりです。
•重いサーフでの動作のための対称両面操作
•重量:乾いた45kg、長さ1m、幅55cm、高さ25cm(長さと幅を拡張可能)
•速度:正転または逆転、1m / sまで可変
•ナビゲーション:3軸IMU、FOG、デュアルエンコーダ、デュアルサイド、デュアル周波数GPS
•コントロール:ユーザーが完全に自律型(事前プログラム済み)、テザー、またはラジオコントロールを選択する
•バッテリー:充電式リチウムイオン
•ポート:充電ポート、プログラミングイーサネットポート、2つのゲストイーサネットポート
Sea Otterデザインはモジュール式です。右舷と左舷のポントーンはコア部分ですが、アイドラスプロケットブラケットを長くしたり、接続ブリッジを外すことによって、長さ、幅、および地上のクリアランスを変更することができます。現在の設計には、2つのイーサネットゲストポートと、データ集録やビデオボードなどの追加の回路基板用の内部スペースが含まれています。
モジュラー設計により、ペイロードの形状、容積、または重量に関わらず、ストラップ・オン・ペイロードを数分で取り付けることができます。
ペイロードには、塩分、濁度、音速、様々なカメラ、イメージングソナー、放出可能なブイ、土壌浸透度計、電磁センサースレッドなどが含まれています。
 図2:カワウソのはしご検索パターン。画像:C-2 Innovations、Inc.バッテリとすべての電子機器は、「ボトミングアウト」を最小限に抑えながら、ペイロードベイのフリーボリュームを最大化するトラック容量内に含まれています。ワイドトラックの結果、乾燥時の地圧は1.3キロパスカル未満になります水没すると0.43キロパスカルになる。軌道設計は、より積極的なグリップのために変更することができます。乱流と抗力を最小限に抑えるためにフェンダーが追加されています。単軸の光ファイバジャイロ(FOG)と3軸慣性測定ユニットのデータを融合することで、自动航行精度を実現します。デュアルバンドGPSは、浮上したときに修正を受け取り、位置のクロスチェックとして使用されます。各ドライブ側のシャフトエンコーダは移動距離を測定します。
図2:カワウソのはしご検索パターン。画像:C-2 Innovations、Inc.バッテリとすべての電子機器は、「ボトミングアウト」を最小限に抑えながら、ペイロードベイのフリーボリュームを最大化するトラック容量内に含まれています。ワイドトラックの結果、乾燥時の地圧は1.3キロパスカル未満になります水没すると0.43キロパスカルになる。軌道設計は、より積極的なグリップのために変更することができます。乱流と抗力を最小限に抑えるためにフェンダーが追加されています。単軸の光ファイバジャイロ(FOG)と3軸慣性測定ユニットのデータを融合することで、自动航行精度を実現します。デュアルバンドGPSは、浮上したときに修正を受け取り、位置のクロスチェックとして使用されます。各ドライブ側のシャフトエンコーダは移動距離を測定します。
総範囲の2%の精度が日常的に達成されています。ターンインプレース(TIP)とアークターンは、パスの精度を維持するために計算されます。図2は、メイン州のヨークにあるWells Beach沿いにあらかじめプログラムされたラダー検索パターンを示しています。テストは、潮が高く、システムが浸水している間に発生しました(写真は干潮時です)。
Sea Otterに加えて、より大きな変形があります。 Sea Oxは、海底をマッピングしてサンプリングするために設計された汎用の海底ボトムクローラーです。 Sea Otterのように、モジュラーデザインは輸送、保管、配備が容易です。このシステムは、自律的に、またはテザーまたはRFコマンドによって動作するように設計されています。シーオックスは標準構成で122 x 122 x 30 cmですが、レンジや牽引能力を高めるために迅速に拡張することができます。図3に示すように、シー・オックスの海域は32kmで、バッテリパックを64マイル追加することで延長できます。トラクターの全重量は113kgで、高いサーフで動作する場合は230kgにバラストすることができます。
Sea Oxはもともと、White River Technologies、Inc.によって設計されたツイン電磁誘導(EMI)コイルを組み込んだ計装スレッドを牽引するように設計されていました。60 x 180 cmのスレッドは計装を含めて30 kgです。海洋オクスとそのスレッドは、CTD、溶存酸素(DO)、音波ロガー、音響イメージャ、音響ドップラ電流プロファイラ(ADCP)などの追加の計測器パッケージにボルトで固定するために使用されています。 。開発中には、海底環境からの物理的サンプルを回収するためのマルチショットコアリングシステムがあります。
2つの魅力的なアプリケーション
海底を這うロボットは単純な新奇ではありません。多くの重要なアプリケーションを可能にします。シーオックスの水陸両用の性質は、100mの深さに渡って遷移地帯を通る陸上での操作を可能にします。 30cmの低さのプロファイルは、低速の土壌/水境界層で動作することによって抗力を低減し、表面交通の下で邪魔にならないように動作させます。ワイドトラックは、0.0186バールという非常に低い地上圧力を生成し、人間よりも桁違いの非常に柔らかい地面を通過することができます。水深16kmの水面(32 + kmの表面)では、1日で全浜を調査することができます。シー・オックスのモジュール性により、それは敏感な浜辺を手渡し、海岸から一人の人が立ち上げ、回収することができます。ロジスティクスコストが実際の操作を上回ることができる従来のシステムの一部に調査のコストを削減します。いくつかの最近のアプリケーションがこの可能性を示しています。
UXO修復
シー・オックスは、トランジション、サーフィン、および非常に浅い水域でのUXO調査のための、人が携帯できるボトム・モビリティ・プラットフォームです。 DoDの環境技術デモンストレーションおよび検証プログラムである環境保全技術認証プログラム(ESTCP)の資金提供を受け、
•システムが境界ゾーンで動作し、電流への暴露を最小限に抑え、抗力と波の影響を最小限に抑える薄型設計
•強力なモジュラー軽量設計により、フットプリントとバラストの調整が可能で、低いベアリング圧力の土壌や泥だらけの輸送に対応し、計測用スレッドを引っ張る牽引力を提供します
•モジュラリティと現場での組立てにより、環境に敏感な、または困難な地形を一人で輸送できます。
•計装干渉を最小限に抑える非常に低い自己生成電磁(EM)および音響ノイズ
このミッションでは、Sea Ox社はWhite River Technologies、Inc.(WRT)のMarinized Flex-EM検出器アレイを牽引しました。プロジェクトの目的は次のとおりです。
•さまざまな地形や海の州を行き渡った計装パッケージを介して、統合された地球物理学的調査を実施する能力を評価する
•トウパッケージを使用してマヌーバ戦略を開発する
•マッピング、カバレッジ精度の決定
小型モジュール設計の運用上の利点を評価する
•動員および解散、環境および積載量のサポートのための現場固有の車両修正、停車車両の復旧および保守および修理を含む完全なライフサイクルコストの有効性を示す
これらは達成された。より能力の高いシー・オックスは、1つの工具アセンブリと最大25kgの部品重量でモジュール式です。それは、複数の場所、自己配置の日周り、および季節的な場所の特徴付けのために、1年に一度駅を維持することができます。
それ以降。 。 。
海底クローラは、海底ロボット工学の新しいカテゴリーです。これらのツールは、改良されたコンポーネントテクノロジによって実現され、現在、有用なパフォーマンスを提供しています。サーフゾーンを通じた持続的で正確な調査のために、私たちを海に戻す実行可能なロボットプラットフォームがあります。
-169277 "(写真提供:PRIO)")

-169139 "(写真提供:ドミニオン・エナジー)")

-169108 "(写真提供:カデラー)")






-168831 "(クレジット:SLB)")