待機中の居住
")
水上船に依存せずに海中作業をサポートできる水中ビークルを持つことは、長い間ビジョンでした。私たちはこれまで以上にこのビジョンに近づいていますが、これを実現するために以前になかった新しいことは何ですか?
今年の初めに、石油およびガス事業の水中車両でマイルストーンに到達しました。自律的な水中車両(AUV)は、スウェーデンの湖でのデモ中に、リモートで自動制御とライブの視覚制御を使用して、データをすべて誘導的にワイヤレスでドッキング、充電、およびダウンロードしました。ドックはEquinorのオープンスタンダード海中ドッキングステーション(SDS)であり、車両はSaab SeaeyeのSabertoothでした。
これは、車両を恒久的に海中に常駐させることに向けた一歩であり、他の人が新しい車両をテストするにつれて、そのようなデモが増えています。しかし、私たちが以前にここに来たと言う人もいます。これは1990年代に試みられました。それで、何が新しいのですか?それは、市場主導型と技術主導型の力の組み合わせです。
Equinorの海中介入とパイプライン修理のマネージャーであるGro Stakkestadにとって、それは不況、自動化の推進、環境意識の向上の組み合わせです。 Oceaneeringの欧州新興テクノロジーディレクターのSteffanLindsø氏は、オフショア通信が主要な欠けているコンポーネントであり、バッテリーとナビゲーションテクノロジーの進歩であると述べています。一方、新規参入のヒューストンメカトロニクスの製品管理およびマーケティングディレクターのSean Halpinは、コスト削減と計算能力へのアクセスが大きな推進力だと言います。すべての電界インフラストラクチャへの移行も役立ちます。
最終作品
Saab SeaeyeのチーフエンジニアであるJanSiesjöにとって、ドッキング、充電、およびデータのダウンロードをまとめることは、この機能をフィールドに持ち込むためのパズルの最後のピースでした。しかし、バックグラウンドでは、主にリモートコントロール機能に関する他の多くの作業があります。
「長距離のリモートコントロールは簡単に思えるかもしれませんが、信頼性を高めるには、多くのものが必要です。インターネットを介してコマンドを送信するだけでなく、自分自身を安全に保ち、問題が発生しないように維持できるシステムを備えています。何か問題が発生しても、それほど複雑ではないため、大学のエンジニアが修正する必要があります。」ステーションキーピング、ウェイポイントナビゲーション、障害物回避が含まれます。
通信側では、サーブシーアイはボーイングと協力し、米国全土の衛星リンク上でLeopard軽作業クラスの遠隔操作水中ビークル(ROV)を実行し、マニピュレーター作業、嵌合コネクター、飛行ミッション、ウェイポイント制御などを行っています。 Siesjö氏は次のように述べています。非常に厳しい制限があり、わずか1 mb /秒、遅延が最大3秒にまで押し上げられ、意図的にデータ品質を台無しにしました。 「それにもかかわらず、私たちはフライングリードコネクタを嵌合し、他の多くのことを行うことができました。長期的な目標は、非常に大きなAUVからROVを飛行させ、さまざまな方法で介入作業を行うことです。」
 今年初めにスウェーデンで誘導充電とデータダウンロードを実証したSaab SeaeyeのSabertooth。 (写真:Saab Seaye)
今年初めにスウェーデンで誘導充電とデータダウンロードを実証したSaab SeaeyeのSabertooth。 (写真:Saab Seaye)
深部での作業は別の課題です。サイトにアクセスしてから通信リンクを維持することです。今年の初めに、Saab Seaeyeはこのシナリオを試行し、地中海の水深2,400メートルで3週間のテストを行い、係留および自律的に-最大4ノットのフルスラストでも車両の通信とポジショニングを100%成功させました。シエショー。これらの深さでの作業には、慣性航法システム(INS)と超短ベースライン(USBL)測位の組み合わせを使用して、測位を維持しながら、作業場所まで効率的に移動する方法の決定(2,400メートルはかなり先です)が含まれます。
Saab Seaeyeは、親会社の戦闘機をテストするために使用されるような忠実度の高いシミュレーターで作業をサポートしているため、ネイティブ制御ソフトウェアを使用してすべての自律およびヒューマンインザループ制御システムを実行し、動作するかどうかを確認できます–水に入るかなり前。
さらに、ステレオカメラシステムを使用して3D同時ローカリゼーションおよびマッピング(SLAM)を実行することにより、車両が現在の環境の3Dマップをリアルタイムで構築する方法に取り組んでいます。これにより、車両はナビゲートし、車両と比較して見えるものを測定できます。 Saab Seaeyeは2018年からこの機能をテストしており、水中世界の3Dクラウドを構築しています。
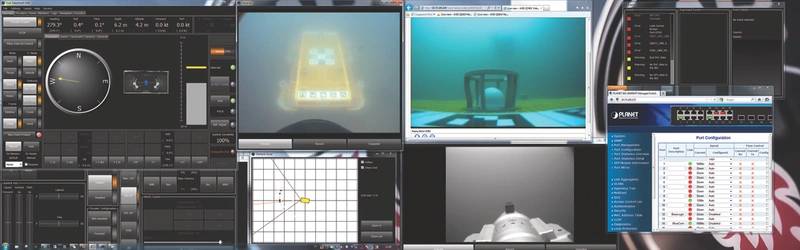 使いやすい高度なリモートコントロールにより、ドッキングが実証され、ライブビデオフィードが岸に送られました。 (画像:Saab Seaye)
使いやすい高度なリモートコントロールにより、ドッキングが実証され、ライブビデオフィードが岸に送られました。 (画像:Saab Seaye)
GeosubからAIV
この機能を構築してきたもう1つの企業はSubsea 7です。1990年代には、Subsea 7が国立海洋学センター(NOC)からライセンスした技術であるGeosubの背後にありました。その主な目標は、ウェイポイントナビゲーションと自動追跡を使用して海底調査データを収集し、品質と効率を高め、水上船のサポートを削減する、自律的なパイプライン検査でした。データ品質の点では成功しましたが、それでも船から打ち上げて回収する必要があり、測位のための表面サポートが必要でした。また、陰極保護測定を行うことができなかったため、制限されていました。
サブシー7は、i-Tech 7事業を通じて前進し、現在は自律型検査車両(AIV)を持っています。その中心は再定位機能であり、その前駆体であるプロトタイプAIVの下で開発されているため、定期的な位置付けは不要です水上艦からの更新。 「開発は、内陸海底インフラ検査の能力に焦点を当て、自律ホバリング車両に移行する決定によって引き起こされました。現在、目的は既存の機器の検査に集中しているため、機器自体を追跡して、水上船舶からの更新なしでナビゲーションに必要な高精度の位置を提供することができました。」オートトラッカーに似ていますが、3Dであり、スラム。
また、AIVは独自の海底ドッキングシステムを備えており、船舶からの打ち上げおよび回収作業を切断します。 「簡素化されたミッション計画の導入は、パワーナビゲーションのローカライズと、AIVがバスケットにセルフドッキングできるプロセスにリンクされ、船舶への依存とのリンクを効果的に切断しました」とJamiesonは言います。
 ROVを使用したリモート操作も行われています。これは、ROV操作用のi-Tech 7の陸上管理センターです。 (写真:i-Tech 7)
ROVを使用したリモート操作も行われています。これは、ROV操作用のi-Tech 7の陸上管理センターです。 (写真:i-Tech 7)
標準化されたドッキング
この分野での大きな後押しは、Equinorが「水中介入ドローン」(UID)と呼ばれるビジョンを推進し、任意の車両が使用できるオープンスタンダードSDSの設計を含む契約を授与することによってもたらされました。 。 SDSの設計には、Blue LogicおよびWiSubからの誘導コネクタと、AruCoおよびChaRuCoマーキングが組み込まれています。これらのマーキングは、ドローンのカメラが相対的な位置を把握していることを確認します。トロンハイムに拠点を置く音響通信および測位会社のWater Linkedは、車両を駅に配置するための小型音響モデムも提供しています。 SDSは、ライブビデオフィードまたは高帯域幅データダウンロード用のSonardyneのBlueComm自由空間光モデムなど、他のセンサーにも対応できます。メカニック向けに、SWiG(Subsea Wireless Interface Group)グループおよびDeepstarを通じて開発されている標準インターフェイスもあります。
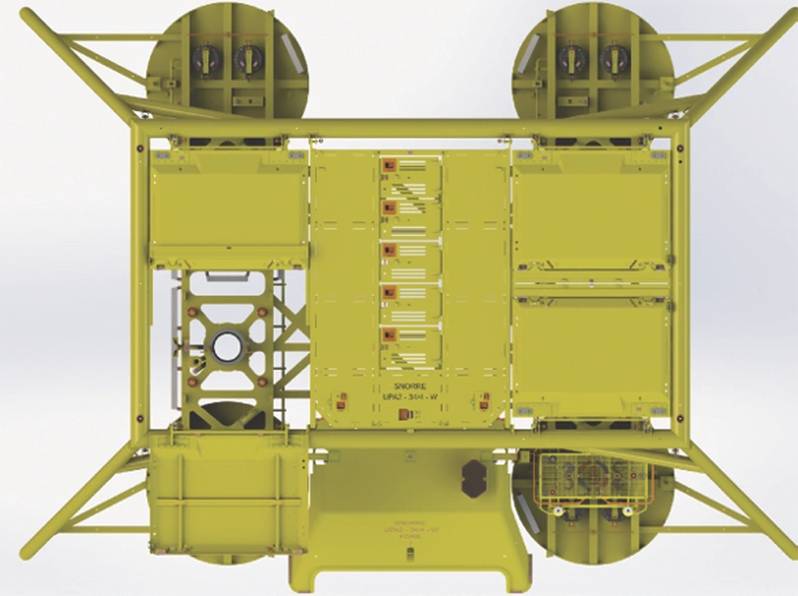 Equinorのオープンスタンダードな海中ドッキングステーションのデザイン。小さなヘリコプターパッドのように、マニホールドにスロットが挿入されています。 (画像:Blue Logic)
Equinorのオープンスタンダードな海中ドッキングステーションのデザイン。小さなヘリコプターパッドのように、マニホールドにスロットが挿入されています。 (画像:Blue Logic)
ノルウェーのBlue Logicによって構築されたSDSは、トロンハイムのドックに配備されており、350メートルの深さのトロンハイム生物ステーションの沖合い2.2キロメートルにも配備されています。もう1つはÅsgardフィールドに行き、そこではEelumeの「スネークロボット」がÅsgardA浮体式生産ユニットに接続されたパワーおよび光ファイバーテザーで動作します。次のステップには、7 kmのSDS(マニホールドに統合するか、ファイバーグラス保護カバー付きのスタンドアロン)を15 km離れて使用し、フィールドレイアウトで電力と通信に接続できるSnorre Expansion Projectのより広範な展開が含まれます。
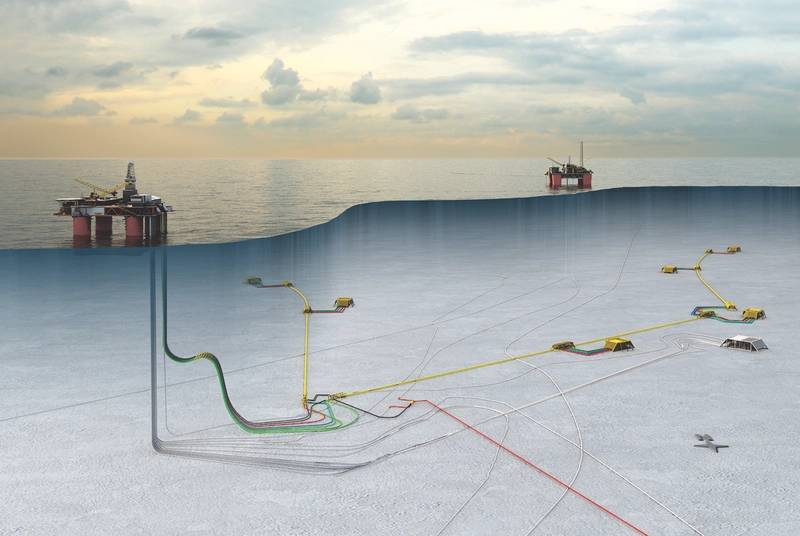 Snorre Expansion Projectのフィールドレイアウト。水中ドローンで間もなくサポートされる可能性があります。 (画像:Equinor)
Snorre Expansion Projectのフィールドレイアウト。水中ドローンで間もなくサポートされる可能性があります。 (画像:Equinor)
新しいモデルの開発
これらの開発は、現在、新しいグリーンフィールド開発の計画方法に影響を与えています、とJamiesonは言います。実際、i-Tech 7は、ノルウェー海のSnorre Expansion Project(SEP)およびSnorre A(SNA)フィールド、および他のフィールドのUIDを使用して、Equinorのフィールド全体のIRMサービスを調査しました。
この研究では、海底でのUIDの長期的な展開を妨げるような技術的なギャップを特定することにより、海中ハイブリッド車を導入する可能性を評価しました。また、必要な構成と特性の概要を提供することにより、車両をサポートするドッキングステーション構成のオプションを評価および推奨しました。電力と信頼性の高いデータネットワークが成功に不可欠であるため、同社は海中ハイブリッド車による活動をサポートするための運用と管理の規定を検討しました。このプロジェクトの最終的な目的は、2020年後半までにドローンを「稼働」させるための開発計画を推奨することでした。
「海底ドッキングステーションでサポートされ、自律型検査に使用され、陸上の制御室にリンクされた海底ホスト車両は、介入タスクのループ制御で人間が再び肯定的な方法で要件を推進しています」とJamiesonは言います。 「車両は一度に数か月間、海中に常駐する必要があり、修理や修理のための修理は必要ありません。この信頼性と制御のより高い水準は、陸上制御センターからの車両の遠隔制御と信頼性と効率を向上させるための車両の電動化により、従来のROV操作にも力を与えています。
海中システムをよりシンプルにする可能性があります。安全性が重要なシステム以外のアクチュエータは、油圧または電気の代わりに手動にすることができ、海底に設置する必要がある油圧および電気システムを削減できます。つまり、ケーブルが少なくなります。
Blue LogicのビジネスマネージャーであるHelge Sverre Eide氏は、ドローンが海中を飛び立つためには、海底システムと運用哲学を変える必要があると言います。 「これを経済的にするには、ドローンの作業範囲を広げる必要があります」と彼は言います。 「新しいツールが必要であり、海底生産システムを調整または変更する必要があります。方程式の両側を変更する必要があります。新しいツールは、ドローンが飛行できるように軽量でなければなりません。海中のメンテナンスは、交換するためにより小さい部分を持つことに変更する必要があります。別の考え方-何かがシャットダウンした場合、それを変更することができます-が可能になりました。それは新しい哲学です。」
 (写真:サイペム) (写真:サイペム) |
イタリアでは、SaipemはHydrone Rで忙しく、これはイタリア北東部のTrieste港近くのSaipemの水中「プレイパーク」で6か月のトライアルを開始しました。車両は、2020年にノルウェー沖のEquinorによって展開されることが最近発表されました。Equinorは、Njordのライセンスに代わって、Nipedの生産再開時に開始する技術を使用するために、4,370万ドルの10年の海中サービス契約をSaipemに与えました。 。 Hydrone Rは、AUV機能を備えたハイブリッドROVとして説明されます。たとえば、介入作業用のマニピュレーターがあり、300メートルのテザーで動作し、全帯域幅のリアルタイム制御が可能ですが、海中を移動することもできます。 AUVのように繋がれていないフィールドで、4キロメートルまでの音響通信があります。作業現場に到着すると、監視された運用のために高帯域幅の光通信に切り替えることができます。 Hydroneは、ミッションベースで海底ガレージまたは地上展開システムのいずれかから展開できます。サイペムのテクニカルマネージャーであるステファノマッジョは、3,000メートルの定格で、テザーなしで8〜10時間、10キロメートルまで運転できました。 Maggio氏は、海中のインフラストラクチャが不要なため、地上のホストからの展開が容易になる可能性があると述べています。 「展開のために気象条件に敏感かもしれませんが、メンテナンスは簡単です。」しかし、「海底居住者システムは天候に敏感ではないので、それを展開して、回復するまで1年6か月間滞在します。しかし、それは定期的に維持できないことを意味するため、最高の信頼性が必要です。」 |
掘削作業の進展に伴い、ヴァールコ社はガボン沖での良好な掘削結果を報告した。
-171461 "(写真提供:Vaalco Energy)")
Cadeler社、RWE社の1.4GWソフィア洋上風力発電所に最後のタービンを設置
-171414 "(写真提供:カデラー)")
Serica社、ONE-Dyas社から北海資産の買収を完了
-171360 "(写真提供:Serica Energy)")
ペトロブラスがブラジル沖合のエクイノールが操業するイタイムベジーニョ鉱区に参画

-171237 "(写真提供:SLB)")
-171198 "イラスト(提供:Eni)")

-171164 "(写真提供:マシラ・オイル)")
")
-171032 "トランスオーシャン・イクイノックス掘削リグ(写真提供:コノコフィリップス)")

-170882 "バウナ油田のFPSO(写真提供:カルーン・エナジー)")
-170704 "(写真提供:ウィルソン・ニュー・エナジーズ)")